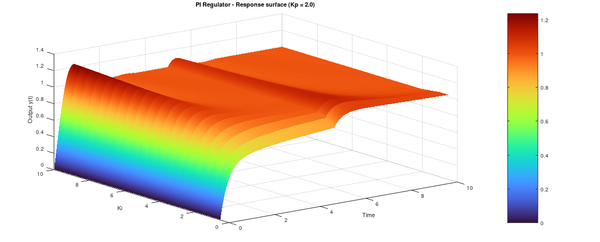
PI regulator in code
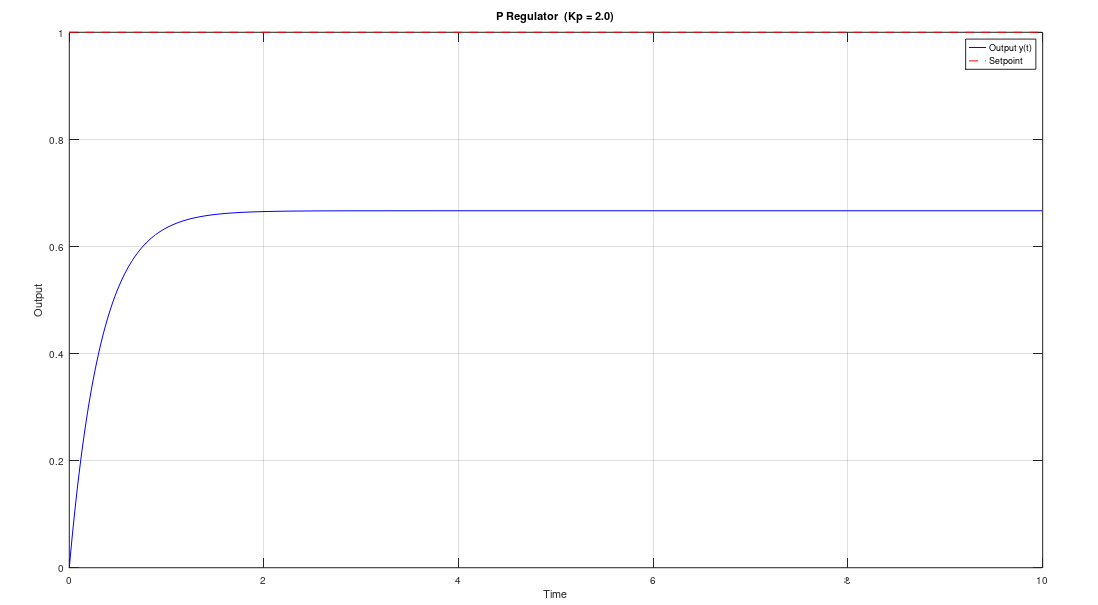
Goal of the day is understanding the PI regulator. Before anything there is a great resource that explains PI and other regulators in detail and its: controlsystemsacademy.com t = 0:0.01:10; % Time vector setpoint = 1.0; % Desired value Kp = 2.0; % Proportional gain(how strong the P part